Doubleweave Competition Towel

Silk Shadow Weave Stole

Inspiration
- Project inspired by Hackaday post
- Siren Elise Wilhelmsen designed art project clock that knit a stitch every half hour
- After a year, it dropped a completed scarf to the ground
- No build plans, can commission a clock from the artist
- "I want one!" "You should make one!" "OK!"

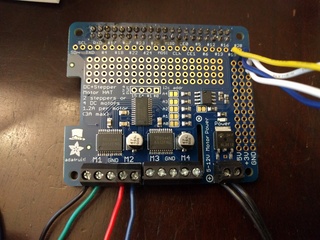
Electronics
- First PoC: Can I control steppers from a RPi?
- Used Adafruit motor hat for RPi
- Combined hat w/ spare RPi and stepper motor
- Followed motor hat docs
- Motor hat needs 5v-12v PS, found 9v and 12v in stash
- Went w/ 9v for size reasons.
Electronics
Hardware Buttons
- Realized useful to control steppers manually
- Instead of SSHing in, decided to add physical buttons
- Dug through con badge stash, found push buttons
- Followed Adafruit's GPIO guide
- Settled on two buttons to move forward/backwards one stitch.

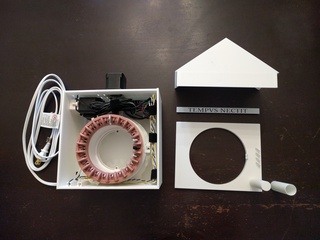
Knitting Machine
- Started with Sentro 48-hook knitting machine
- Matched hook count in original project
- Makes sense as a clock
- 48 hooks = stitch every 30 mins
- Planned to build wooden case w/ bird house design
- Within 2 weeks from start, had everything completed, mounted to board
- Realized clock was way too large, back to drawing board.

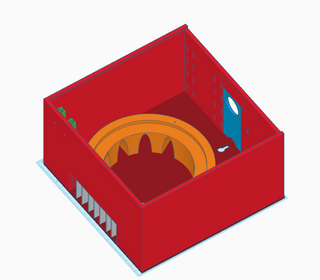
Case
- Realized disassembled machine fit on my 3D printer bed
- 3D printed case an option
- Problem: no 3D modeling experience
- Solution: 3-4-week crash course in 3D modeling with Tinkercad
- Iterative process using calipers, prototyping sections at a time
- Machine mount most critical part for fit
- Design mimics bird house, mounts everything to large bottom case
- Top splits into three sections that slide into bottom case
- Allowed access to electronics w/o disturbing knitting in progress.
Case
3D Printing
- Bottom case took 2 days to print
- Completely filled print bed
- Took three prototypes to perfect
- Also designed additional parts:
- Plastic button covers
- Clips to hold ring gear to case
- Standoffs to mount RPi
- Spool to hold yarn
- All designs on project's Printables page.

Assembly
- Full installation steps on my project page
- Bill of Materials:
- Sentro 22-hook knitting machine
- Raspberry Pi
- Adafruit Motor Hat
- (2) Tactile Button switches
- Solid core 22AWG wire (multiple colors)
- NEMA17 stepper motor
- 9V/1A DC power supply
- 5V/1A USB adapter
- 3-4 meter AC extension cord
- 3D printed parts from my Printables page
- (3) size 4 1/2" wood screws
- (4) M2x16mm screws and matching nuts
- (2) M3x8mm screws

Assembly
Bottom Case
- Everything attaches to bottom case, then lid slides on
- Start with RPi, then knitting machine, motor, motor hat
- Next push buttons, AC outlet
- Used zip ties to fasten AC outlet, tidy cables.

Assembly
Top Case
- Top case split into three parts
- Necessary to fit on 3D printer bed
- Gives easier access to electronics
- Bottom cover needs different print orientation than "roof"
- Also reduces support material in print.
Assembly
Top Case A
- "A" part attaches first at angle
- Must pop in place to avoid extended hooks
- Holds pink plastic hook covers in place.

Assembly
Top Case B and C
- "B" part has name, slides in place
- Used two colors so text more visible
- Also covers up joint between pieces
- "C" part covers stepper, acts as "roof".
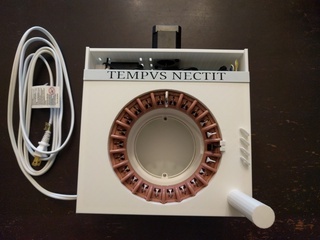
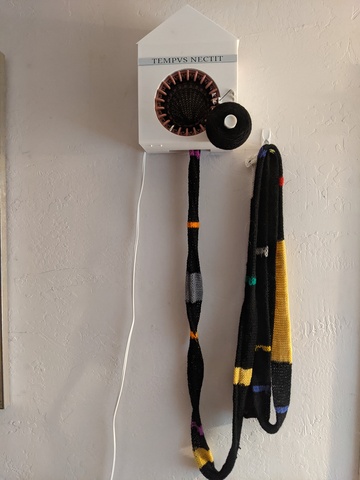
Assembled Clock

The 2023 Scarf
- Decided to mark notable events with colored stripes in scarf
- 2023 an eventful year. Scarf documented:
- Major holidays
- Awards/residencies
- My layoff
- 3+ week, ~9k mile road trip across the country
- A stroke
- Moving family across the country
- Death in the family.
The 2023 Scarf
